
长江是我国第一、世界第三大河,已经成为世界上运输最繁忙、运量最大的通航河流。但由于长江部分航道狭窄、支流纵横、浅滩甚多、码头密布、通航环境相对较差,机动船及驳船等小型船舶较多,船型复杂,特别是在桥区、狭窄河段等航区,对驾驶人员及导航信息系统提出了更高的要求。近年来,以科技为依托,以信息化为主导,数字航道与智能航运发展迅猛,提出了“数字长江”的理念。驾驶人员依托电子海图显示和系统信息(ElectronicChartDis-playandInformationSystem,ECDIS)制作了电子江图,并融合全球定位系统(GlobalPositioningSystem,GPS)、船舶自动识别系统(AutomaticIden-tificationSystem,AIS)等设备实现了初步的数字导航。
1双背景导航系统设想
随着信息化的普及,内河及近海航行时准确判定船位、识别船舶,了解动态等已经不能满足驾驶人员的需要,信息判读向直观化、快速化发展,随时掌握周围环境及通航状态,导航与避碰信息。因此构建一款基于VMS/NAVIECDIS(VoyageManage-mentSystem/NavigationECDIS)的船舶导航信息系统,充分利用现有的船舶设备资源,配有电子海图以及高分辨率卫星遥感影像的双背景图层,驾驶人员可根据需要随时在电子海图和卫星遥感影像之间切换,电子海图展现详细的水域要素,遥感影像展现直观形象的陆域、沙洲及码头等范围内的陆域要素,信息丰富、制作便捷,能顺应未来航海信息化发展要求。
2双背景导航系统特点
新背景图利用卫星遥感影像,通过几何纠正、投影变换和比例尺归化等,并以此为载体,叠加必要的地形、海图要素和专题信息生成新的数字海图产品。如陆基岸线、码头形态、岔河口等,与先前的单一工作背景图相比,既具有海图的几何性质,又具有影像的直观特征。
2.1空间信息丰富,内容层次分明
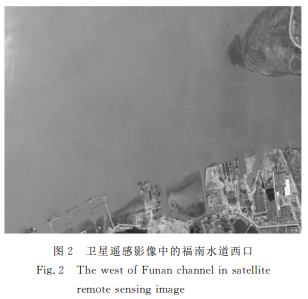
现有的纸质海图对重要地貌物标多以抽象的点线符号表示,不够直观;自制电子江图反映的陆岸及水域为块状示意图,界线模糊,航道宽度不明,更谈不上岸线实景图,岸标视景图等,不利于驾驶人员对所处环境及他船动态的准确识别与判断。而当前主流卫星遥感影像的分辨率都在1m以内,为驾驶人员提供的信息更加直观,环境更富立体感、可视性强,相对关系明确、细部反映真实,方便定位和助航。该系统可减轻驾驶人员的工作压力,降低视觉疲劳,提高导航安全效率
2.2环境要素齐全,信息互补性强
长江纸质蓝图,航道测量数据是通过航测船对航道分时段采集,水深底貌等信息虽密集可靠,但采样的数据相对于长江来说只能算得上是“稀疏”,航测船仅测量航道水域数据,如遇汛期航道情况则更加多变。而遥感影像可以作为海图重要的数据源,具有大范围实时同步获取不同尺度的时空信息和不受环境条件限制等优势,同时相的影像可以全面宏观地获取陆域及水域信息。双背景工作底图将地理信息系统和航道这两个行业融合在一起,提高了信息的准确性。
2.3数据更新快速,制图高效便捷
纸质海图套用的岸基部分资料来源主要为地形图,而一般地形资料更新速度慢,有的海图还套用20世纪80年代的地形图资料,甚至还有20世纪50年代调查的数据,与现实相比有极大差异;以此为基础制作的电子江图水域和陆域通常表现为块状示意图,经常发生偏离情况,既严重影响导航的视觉效果,又影响到驾驶人员对位置态势的判断。而利用遥感技术可以快速、准同步地进行岸线及沙洲的测绘,从而缩短海图的更新周期,同时影像工作底图的制作流程相对传统海图制作简单快捷,具有视野广、速度快、质量高等优点,改进了工作方式,提高制图效率和管理水平。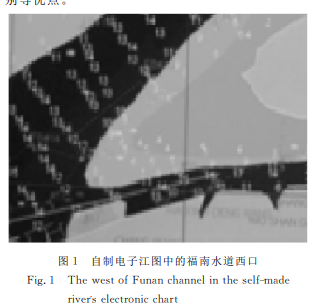
3双背景导航系统实现
基于ECDIS双背景船舶导航信息系统是以ECDIS作为基本硬件设备,采用AIS通信系统接收数据,系统每次支持一种显示方式,信息实时、图像生动、易于判读,可为船舶提供完善的导航信息服务。
3.1基本构成
ECDIS作为构建中的新导航信息系统的核心部分,以当前船舶配备使用的ECDIS作为软硬件支持,以Y轮为例,该船配备的SPERRY综合桥楼系统的VMS/NAVIECDIS由六台计算机通过LAN连接组成,网络系统包括导航站、计划站和信息站。叠加显示连接的电罗经、GPS、AIS等设备实时获取周围船舶信息。计划站可进行海图数字化扫描、地理信息系统(GeographicInformationSystem,GIS)分层与矢量化、电子海图制作与改正、航线设计等工作,具有海图信息显示与处理、航线拟定、标绘航迹、实时监控等强大功能。
3.2技术实现
新导航系统的实现需要解决两个主要问题:
1)点定位信息的获取,即如何将本船及他船的坐标与相关信息传输至该系统中。
2)工作底图匹配问题,即如何对遥感影像图进行矢量化及显示航路点、计划航线等导航信息。
本船位置及他船动态信息采集可直接采用系统现有的GPS、AIS等信息接收设备,实时显示环境内船舶的位置及其他信息,并实时标绘本船的航迹,现有的导航系统平台已经提供了相应的端口,这些技术可直接采用,在此不再论述。
技术关键是如何将卫星遥感影像引入矢量海图开发系统并进行综合应用。目前,VMS/NAVIEC-DIS自带的数字化海图系统利用其配备的数字化扫描仪将纸质海图数字化,主要有两步:
1)将纸质江图利用GIS平台通过扫描、分层、矢量化、着色,转化为电子江图。
2)建立电子江图信息数据库存储主要信息,便于航道信息的管理并实现查询。
3)电子江图的完成分数据采集和数据处理两步:数据的采集主要通过扫描仪将纸质江图转化成栅格江图,存进计算机,数据处理即为对矢量化江图进行数据组织、管理以及空间数据库建立的过程。
栅格化图尚不能进行空间分析和管理,所以必须借助扫描矢量化软件对其进行矢量化,并完成接边、坐标转换等工作,生成矢量江图。卫星遥感影像在图幅设计上基本遵循电子江图的标准和制作技术。
3.2.1图源选择
该导航系统可采用源自GoogleEarth服务器提供的卫星遥感影像作为光栅图像,分辨率为0.6m,足以满足GPS导航的精度要求。如果想获得放大后的清晰图像,可以先分成几部分保存,然后利用Photoshop软件进行拼接。由于已下载的谷歌地图其左上角和右下角均标有地理坐标,不但确定了拟选地图的边幅,还可以获得每一个遥感卫星图像像素所对应的地理经纬度。为了获得更精准的相对位置信息,还应先对遥感影像进行尺寸校正、精度纠正等环节。
3.2.2图像解译
遥感影像是标准的栅格数据结构,是地物的成像表达,即最小单位是由像素构成的图像,与之对应,GIS数据是存储着点、线、面属性以及各个实体之间的拓扑关系等信息。解译实际上就是把栅格形式的遥感数据转化成矢量数据的过程,一般用特征匹配的方法。目前大多数导航系统是基于GIS软件设计,常用的GIS软件有四百多种,VMS/NAVIECDIS遵循IHO(InternationalHydrogra-phicOrganization)关于数字海道测量数据传输标准(S-57),采用了挪威C-MAP的矢量电子海图专有技术,对地物进行数字化、着色整饰,完成工作底图制作。
3.2.3信息叠加
VMS/NAVIECDIS具有海图显示与控制、航线设计、海图标绘等功能,可以将多种数据叠加后在ECDIS上综合显示,系统对加入的要素采用层管理,使用系统强大的层控制要素功能。叠加的信息分三类:
(1)重要地物标注。包括岸标、码头、岔河口;
(2)水域要素标注。如灯浮、碍航物、航线与锚地边线等;
(3)设备信息接收。与之相联接的设备主要有GPS、AIS、自动雷达标绘仪(AutomaticRadarPlot-tingAids,ARPA)等。
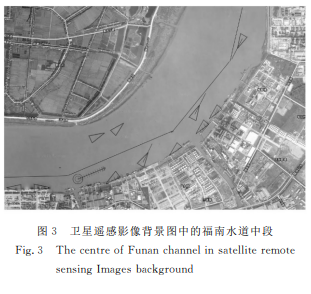
图3为福南水道中段采用遥感影像工作底图所展现的船舶态势。驾驶人员很容易掌握本船船位及周围环境等清晰、精准的信息,还可随时对水域及陆域物标进行相关信息查询活动。
4双背景导航系统的应用前景
该系统融电子海图详细的海域资料和遥感影像图的直观生动于一体,以特有的方式表示海图要素,为驾驶人员提供了更安全、及时、优质的信息服务,具有广阔的应用前景。
4.1高度系统化
开发完善一个覆盖长江及近海海域的遥感影像背景图数据库,并与雷达、定位仪、计程仪、测深仪、GPS、AIS等设备进行组合,使ECDIS功能得到显著的跃升。
4.2信息精准化
不断开拓出最新的高分辨率卫星遥感影像,采用先进的纠正方法修正调整,提高影像判读的质量和精度等,并在此基础上自定义添加陆域和水域的相关要素,如陆标、沙洲、航道、锚地和碍航物等,使提供的信息更加完整、生动。
4.3更加智能化
数字卫星遥感信息可以直接进入ECDIS进行自动处理,省去了图像扫面数字化的输入过程;叠加要素的颜色等可进行调整,直至取得较好的视觉及美学效果。另外,还可以根据需要叠加气象传真图等内容,进行潮汐、水深、气象信息查询。当然,在应用过程中也存在一些问题需要进一步解决。
1)购买正版高清卫星遥感影像价格昂贵。
2)从遥感影像中提取陆域要素的技术已经成熟,但提取海域要素仍有一定的局限性。
3)水域要素中航道、锚地、区域界线等,还需人为划定,现实中并没有实体的表现,在遥感影像中也就无法判读得出。
5结语
高分辨率卫星遥感数据具有的信息丰富、快速真实等特点,已充分展现了其应用潜力。遥感技术是条信息高速公路,影像海图作为信息源顺应了“数字航海”的要求,随着空间遥感技术的发展,以此为工作底图构建的双背景船舶导航信息系统,终将成为船舶安全航行不可或缺的重要技术手段。
