
1问题的引出
1.1地址类型
水平角定位是陆标定位中一种高精度的定位方法,通过在海图上预先绘制水平夹角网,可以迅速确定船位,适用于定点抛锚、岛礁区航行等对定位精度和实时性要求高的场合.当前,航海人员绘制水平交角网仍然以手工绘制为主,其基本方法如下:
1)将海图按比例放大到绘图图纸上;2)根据3个定位标的位置关系,在图纸上定出他们的位置;3)画出左标与中标标连线的垂直平分线,在垂直平分线上,用三杆定位仪定出不同水平角对应的圆心;4)以各圆心和圆心到目标的距离为半径画弧,得到一组水平夹角船位线;5)重复3~4步骤,绘制出中标与右标的一组水平夹角船位线;6)取2组船位线的重合部分,即得到了水平夹角网线.不难看出,手工水平角船位线网,对航海人员的要求很高,绘制工作量大,多为繁琐的重复性工作,且存在一定的绘图误差.
随着电子海图技术的日益完善和计算机的普及,船舶上已具备了相应的软硬件设施,结合电子海图的数据查询、任意缩放和计算机的计算、绘图功能的运用,可以快速、准确地绘制出精确的水平夹角网.其内容遵循有关的国家标准,见参考文献[1-2],以求合理、规范.
2数学模型
2.1位置圆圆心和半径的计算
绘制水平夹角网的关键,要确定对应水平角的船位线圆的圆心和半径.如图1所示,设目标A、B在海图上的坐标分别为(x1,y1)、(x2,y2),2个目标之间的夹角为α.
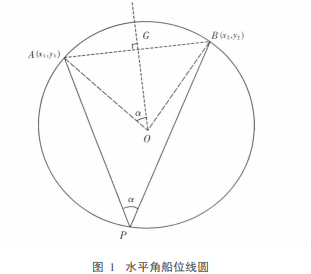
根据几何原理,位置线圆的圆心必在A、B连线的垂直平分线上.为此,作AB的垂直平分线GO,垂足为G,假定位置圆的圆心为O,则∠AOG=α.计算对应位置线圆的圆心和半径的方法如下:
1)计算A、B之间的距离D和方向F(A看B的方位),
2.2边界控制
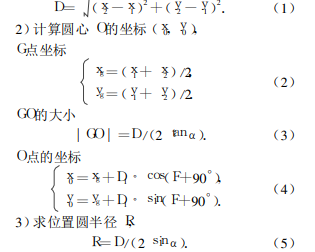
在实际工作中,水平角位置线网不必画出整个位置线圆,只要画出特定区域内的部分.如果画出整个位置线圆,会使图面混乱,影响使用.为了只画出特定区域内的部分位置线,需要计算每个位置线圆的起、终点方向.如图2中的F1、F2
得到了2个交点的坐标,判断交点是否在两端点之间.对应图2的情况,只要交点E(x1,y1)满足关系式xa<xb且ya<yb,则必在边界AB上.根据圆心O和E的坐标,利用公式(1)中的方位公式,可求得起终点方位F1、F2

得到了 2个交点的坐标 ,判断交点是否在两端
点之间 .对应图 2的情况,只要交点 E(x1 , y1 )满足
关系式 xa
用同样方法可依次分别确定另外3条边界与水平角船位线的交点和方向.
2.3注字控制
注字控制的主要目的是便于看清每条位置线的观测值,以便快速定位.要求数字应标注在边界的外侧,以及在区域内的圆弧上,字体方向应与注字处位置线的切线方向一致或与边界线垂直.如图2中,E、F处的注字方向应分别为F1+90°和F2+90°.
3算法设计及其计算机实现
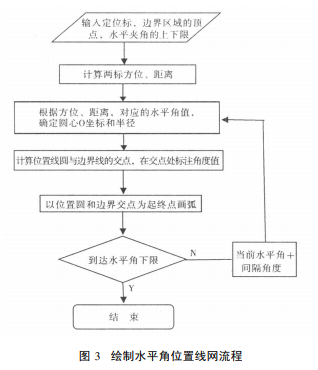
3.1绘制水平角网的基本过程
1)在海图上取符合要求的三物标,设左标、中标、右标分别为L,C,R,存储3点的坐标(经差、纬确定起、终点的方向,首先应确定边界线与水平角船位线的交点坐标.具体做法如下:根据实际需要,确定一个四边形区域,设4个顶点为A、B、C、D,根据A和B的坐标,可得到直线AB的方程为差,数据类型为CPoint);2)计算两标之间的方位F、距离D;3)根据水平角确定圆心和半径;4)计算圆与绘图区域的边界交点,确定画圆的起、终点方向;5)调用绘图函数画圆;6)在交点附近注写角度值;7)重复步骤3~6,每次水平角加上1个增量,直到预定的最大值结束;8)重复步骤2~7,绘制另一组水平夹角网.计算流程如图3所示.
3.2计算机绘制水平夹角网的实现
根据以上所设计的算法进行了编程,并选取海图1087,以三亚湾海区西瑁洲灯桩为左侧标,东瑁洲埋石点为中标,三亚角灯桩为右侧标,其效果见图4.如图4所示,
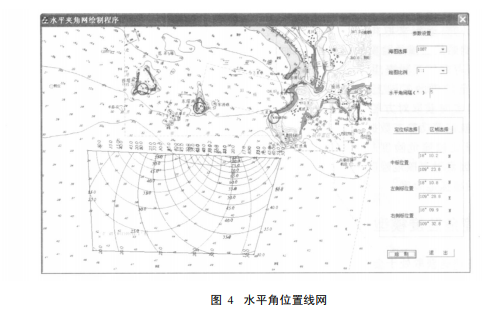
简要介绍本程序所实现的功能.
1)在电子海图上可根据需要直接用鼠标选取左、中、右三定位标并实时显示其位置,确定绘图范围,方便直观:点击“定位标选择”按钮,进入选择定位标状态,在选定的目标点上将出现蓝色圆圈,便于使用者辨识;点击“区域选择”按钮,则进入区域选择状态,根据需要选择显示水平角网的区域.
2)在人机交互界面上,可根据实际需要输入水平夹角网的各项参数,如布雷夹角网的绘图比例,水平夹角的间隔度数,根据不同海区进行海图选择等.
3)该程序可以作为一个功能模块嵌入电子海图系统中,扩展电子海图的功能;对于减轻航海人员的工作负担,具有一定的实用性.
