
0引言
船舶制造及航运业快速发展,航行中船舶的体积及动力系统越来越大,同时航海区域中的船舶密度也越来越高,近年来已经发生多起碰撞事故,大多由于船员的错误决策及恶劣天气引起,所以一套智能型船舶避碰系统越来越成为海上船舶航行的安全保障,也是船舶智能化的研究方向。
船舶避碰系统不仅需要有准确的预测性及高度的智能化,同时还要适应海上变化多端的恶劣环境。现有的避碰系统有基于AIS自动识别系统﹑基于红外线感应系统﹑基于视频监控系统等,这些系统各自有各自的使用范围,如红外感应系统比较适合在较暗环境下的辅助决策,但是对光线等较为敏感;基于视频监控系统则正好相反。
本文重点研究AIS自动识别系统避碰机制,结合电子海图设计一种高精度的综合船舶避碰系统,最后进行仿真。
1海上船舶碰撞过程
根据我国的航海法律及实际情况,两船碰撞由远及近分为4个过程,如图1所示。
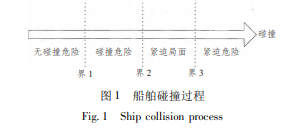
1)无危险现阶段。与相邻船舶之间距离较远,并没有碰撞危险,船舶应按规定的安全速率进行航行。
2)危险阶段。通过电子设备或依据人的经验,判断两船可能发生碰撞的阶段。这时候,不仅需要计算最小会与时间(TCPA)及最小会与距离(DCPA);同时需要考虑危险船舶可能的方向转换及速率变化。
3)紧急阶段。根据我国法律规定,两船相距2~3nmile时为紧急阶段,此时已不能在安全距离进行避碰动作,只能采取转向行动。
4)危险阶段。船舶通过改变航向也不能避免发生碰撞的阶段,此时直航船舶只能采用背离规则,最大可能减少碰撞灾害。
2基于电子海图及AIS的避碰策略
2.1船舶避碰步骤
船舶避碰分为如下5个步骤:
1)观察戒备阶段。船舶保持安全速率和规定航向,通过电子设备及嘹望观察可能出现的危险情况,并通过算法和经验进行评估。
2)信息采集阶段。对航行中的相邻船舶进行信息采集,如航速﹑航向﹑体积大小等参数。
3)信心处理阶段。对采集的信息进行处理,进一步分析出可能出现碰撞的情况。
4)避让手段参数的确定。通过信息处理一旦确认可能发生碰撞的情况,则需要进行避碰行动,确定避碰的各个参数,如转向﹑航速﹑倾斜度等。
5)恢复阶段。避让实施完毕后,后期需要进行手段评估,最终复航。
2.2基于AIS及电子海图的避碰撞参数确定
自动识别系统AIS是一种基于RFID、VHF的信息交换系统,船舶间通过AIS交换航行信息,如船舶编号﹑归属地﹑型号等静态信息及航行经纬度﹑航向等动态信息,航行中的船舶通过AIS获取的信息可以进行避碰参数确定。
本船舶的地理坐标为P1(A0,B0),通过AIS获取的最近的相邻船舶位置为P2(AT,BT),海域的参考位置坐标为P(A,B),可能发生碰撞的两船舶的相对距离为(Dx,Dy),如图2所示。
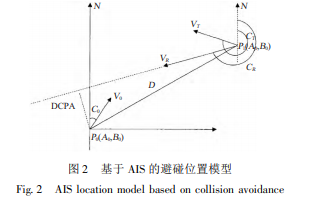
与目标船舶的位置坐标差 ( Dx,Dy ) 为:
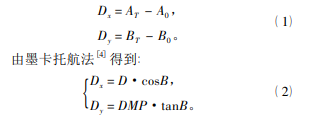
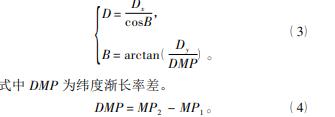
根据 ( Dx,Dy ) 可计算出船舶直线距离及相位 差为:
另外,通过AIS获取的本船舶的参考角度及速率为(Co,Vo),获取的相邻船舶参考角度及速率为(CT,VT),则可计算出两船的相对航向及速率(CR,VR)为:

3避碰辅助决策流程
最后结合电子海图及AIS自动识别系统的辅助决策模型如图3所示。
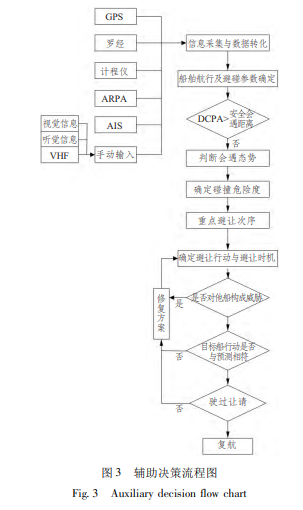
信息采集及处理:在船舶航行中,利用AIS系统采集相邻船舶数据,并根据上节的计算公式得到船舶直线距离、相位差、相对航向及速率(CR,VR),最终求得最小会与时间及最小会与距离。
根据求得的参数判断本船与相邻船舶是否可能发生碰撞,若没有危险,本船舶按照设定的航向及安全速率进行航行;若判断可能发生碰撞,则船舶采用相应手段进行避让。
根据两船的碰撞局面,船舶应严格按照海洋法的相关规则进行避让,若遇到多船碰撞情况,本船舶需要依次判断目标船舶碰撞的危险系数,随后确定避让的次序。
4结语
本文在研究了海上船舶避碰过程,利用AIS的数据信号对避碰参数进行算法描述,最后给出了如何确认避碰参数以及电子海图的船舶避碰流程。
