
0引言
运用信息技术采集警源信息,并利用定量、定性相结合的预警模型分析局面的发展趋势以形成警情预报,尽早排除事故隐患,是当前安全预警系统设计的主要模式。船舶操纵是一项高风险作业,目前每年大约有1万次左右的海难发生,其中碰撞事故占60%以上。一旦发生碰撞事故,将会造成人命、财产的重大损失及严重的环境污染,所以运用现代信息技术设计适合航海环境的安全预警系统辅助船舶避碰在航海领域有很大的研究空间。AIS(船舶自动识别系统)就是一种基于信息技术的系统,它可以实时地提供本船的动静态信息,并与周围目标船通过VHF87、88信道以SOTDMA自组织时分多址方式实现无线数据信息交换。AIS问世以来,其性能及后续功能挖掘被广泛研究。
PPC(可能碰撞点)首先应用于自动雷达标绘仪ARPA,对船舶避碰有所帮助,但由于雷达工作原理的限制,在船舶机动时会致使有效性丧失;本文从分析AIS运用PPC辅助避碰的算法入手,并对PPC应用于ARPA及AIS的差异举要,进而给出电子海图坐标上的实现方法。
1PPC概念及计算方法
1.1PPC概念
PPC:称为可能碰撞点,即目标船保向保速,本船以现有的速度可能在某个航向上与目标船同时到达一点,形成碰撞,这种点就叫做可能碰撞点;如考虑船舶的体积及信息误差以及考虑安全所需的余量,将PPC按照一定的规则扩大为六边形,就是PAD,称为预测危险区。
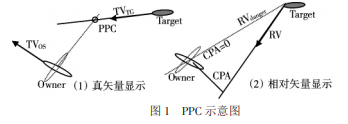
图1是某海域某一目标船对于某轮的真矢量模式下的PPC图及对应的相对矢量模式下的碰撞危险分析示意图。图1(1)中TVTG、TVOS分别表示目标船、本船真速度矢量,其中虚线部分表示在现有的目标船航向航速不变时,如果本船保速并采取虚线所示的航向,将在圆圈所示的位置与目标船发生碰撞,圆圈位置即为PPC。图1(2)描绘了图1(1)所对应的相对矢量分析结果,如前,本船以现有的航向航行,CPA如实线所示大于零,若本船保速并采取虚线所示的航向,CPA=0,与目标船有碰撞危险.
1.2PPC图解与计算
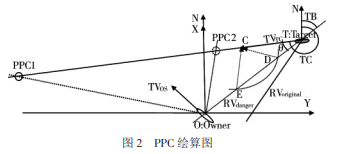
由上节可知,假设目标船相对速度矢量RV延长线穿过本船的现位置时(即CPA=0),对应的目标船的真速度矢量TV延长线与形成CPA=0局面的本船航向线交点为PPC,如图2。
1.2.1PPC图解法
假设目标船真速度矢量为TVTG,本船真速度矢量为TVOS,目标船相对本船的原始相对运动线RVoriginal如图与O点偏离较远,CPA>0;求取PPC,根据定义,对应的危险相对运动线RVdanger过O点,CPA=0,以TVTG矢端C点为圆心,以TVOS长度为半径作弧与危险相对运动线相交于E、D点(本例中可有两个交点,但交点数的确定还受诸多因素影响,将在后面讨论),连接CD、CE,过O点作CD、CE平行线交目标船真速度矢量为TVTG(延长线),交点即为PPC1、PPC2。
1.2.2建立于航海坐标系中的PPC算法
如图2所示,以本船为原点建立坐标系,x轴向指北,y轴向正东。目标船在坐标中的位置为:
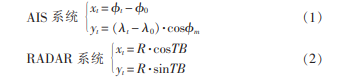
式中:xt,yt为目标坐标;(准t、λt)、(准0、λ0)为目标船、本船的地理纬度、经度;R为目标船的距离;TB为目标船真方位。本文以AIS系统为主研究PPC求取方法。
(1)船舶真矢量矢端位置的求取:矢量矢端位置是由船舶位置、航向、航速、及矢量长度调节时间t决定的。以目标船为例,矢量矢端位置求取分两步:以矢量长度为vTt的正北向向量绕O点旋转航向角CT,得到向量端点坐标;再将向量在坐标内平移使向量轴点移到目标船位置,端点位置即为真矢量矢端位置。写成矩阵形式如公式(3),数学表达式为公式(4)。
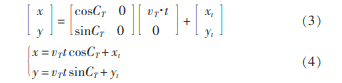
式中:vT为目标船航速;CT为目标船航向;t为矢量调节时间。
同理可得本船矢量矢端坐标,如公式(5)。

式中:vO为本船航速;CO为本船航向;t为矢量调节时间。
(2)PPC位置的求取及关键参数的算法:对PPC的定义可以这样理解,随着t对目标船矢量的调节,当矢端位置到达某点时,目标船矢量长度与该点距本船距离之比为目标船与本船的船速比,该点含义为,若本船以现有速度大小调整航向向该点航行,将与目标船同时到达该点形成碰撞,则该t可表示为tppc。PPC位置表达为公式(6),求解PPC为公式(7)。
将式(6)代入式(7)未知数仅有tppc,求解tppc为式(8)。
将式(10)结果代入式(6)解得PPC坐标(xppc,yppc),坐标结果代入式(1)亦可求得PPC地理坐标(准ppc,λppc),代入公式(11)可解得对应的本船危险航向Cdanger。

1.3影响PPC个数的因素分析
由前述可知,影响PPC个数的因素有目标船的航海坐标系位置(xt,yt)、航向CT、航速vT、本船航速vO。为更形象地说明,结合图2,目标船的航海坐标系位置对应目标船的方位、距离(TB,R),与目标船航向CT结合给出目标船反舷角θ,文献[9]总结了分析结果。
(1)目标船比本船快时:当Vt>Vo>VtSinθ时,有2个PPC;当Vo=VtSinθ时,有1个PPC;当Vo<VtSinθ时,无PPC。
(2)本船比目标船快时(Vo>Vt),有1个PPC。分析结果与公式(10)中tppc解的个数相对应。
2PPC应用于AIS的电子海图的实现
2.1AIS报文采集与解析
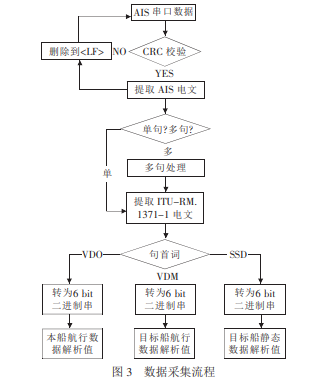
AISPilotport和计算机串口相同,符合RS232、RS485/422接口标准。AIS串口通信满足IEC61162(1、2)协议,低速率为4800bit/s,高速率为34800bit/s。AIS报文语法结构符合NMEA0183接口语法规范,整句以‘$’或‘!’开始,以‘CR’或‘LF’结束。数据域中的二进制编码含义是由ITU-RM.1371-1协议规范的,每个语句最长长度限制为82个ASCII字符,只有对收到的数据按照相关协议进一步解析才能最终获得船舶的动静态信息。AIS语句中和船舶监控相关的IEC61162语句主要有(!AIVDM、!AIVDO)二种,分别表达目标船、本船航行动态,语句格式相同。以一AIS目标船例句“!AIVDM,l,1,,A,15Cg…,O*3D”解析。CRC校验后,解析得二进制码序列“00000100……100101”,其中9-38位:MMSI码;51-60位:对地航速,如0000000101=10节;62-89位:经度以l/10000弧分表示,如0100001111101111111011011110=东经118度04.4126分;90-116位:纬度,如000111000000101001110111010=北纬24度30.1498分;117-128位:对地航向以1/10度表示,如100101100000=234.0度……限于篇幅其余从略。采集流程如图3。
2.2AIS数据以及PPC等电子海图可视化的实现
2.2.1AIS数据及PPC等电子海图实现的软件流程
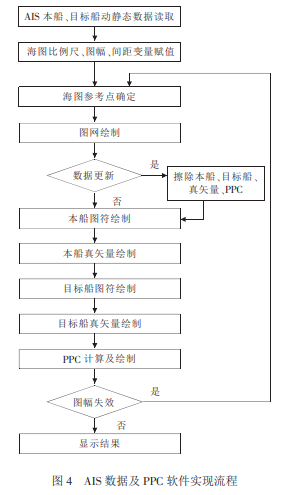
AIS系统中的关键点均可以解算得地理坐标,系统采用VC++画笔功能进行海图图网与相关符号的绘制。具体流程为:先对AIS系统采集的本船、目标船动静态数据缓存,依据本船位置,按一定的比例尺及图幅所需的显示范围,确定图幅参考点(SW点),以设定的经纬网间隔按照墨卡托海图投影原理绘制相应的地理坐标网格,以此为底图根据本船地理坐标绘制本船图符,根据矢量调节时间变量t计算本船真矢量终点,运用MFC画笔连接本船位置及真矢量终点位置形成本船真矢量;参考本船绘法,绘制目标船图符及真矢量;根据PPC位置计算结果,绘制PPC符号。软件实现流程如图4。
2.2.2电子海图实现中有关坐标转换算法
将AIS在地理坐标系(WGS84大地坐标系)的位置坐标换算成计算机屏幕坐标分三个步骤完成。
(1)墨卡托投影正变换,即大地坐标(准,λ)(纬度,经度)转换为墨卡托直角坐标。
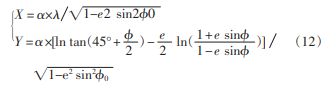
其中:(λ,准)为地理坐标;(X,Y)为墨卡托直角坐标;α为地球椭球长半径;e为椭球体第一偏心率;准0为墨卡托投影的基准纬度。
(2)墨卡托直角坐标转换为海图平面坐标,以海图SW点为参考点,墨卡托坐标为(XSW,YSW)。

其中:(XCHART,YCHART)为海图平面坐标;(X,Y)为墨卡托直角坐标;S为比例尺。
(3)海图平面坐标转换为屏幕坐标。设海图直角坐标为(XCHART,YCHART),横幅为W0,纵幅为H0;屏幕显示坐标为(XP,YP),横幅为W1,纵幅为H1。电子海图坐标和Windows屏幕显示坐标有区别,海图平面坐标的原点在左下角,横坐标向右递增,纵坐标向上递增;而Windows屏幕显示坐标的原点在左上角,横坐标向右递增,纵坐标向下递增,则它们的线性关系为:

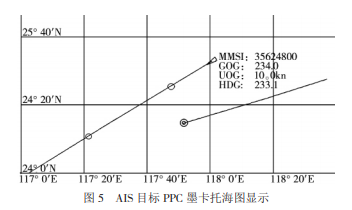
后续可望以VC++集成MapX对象的设计方案,解析S-57电子海图实例并转换成mapinfo格式数据,建立MapX类对象与mapinfo格式数据关系,搭建海图显示平台,实现GIS平台上的可视化。基于电子海图的AIS目标及PPC运行效果如图5。
3ARPA与AIS应用PPC的差异及有关注意点举要
3.1ARPA中的PPC应用
PPC的解算是以真速度矢量为基础的。ARPA中无论目标船机动还是本船机动,都会造成相对运动轨迹的改变。根据ARPA的目标跟踪原理,ARPA需要时延后位置外推才能逐渐稳定跟踪,一般需要1~3min才能得到目标稳定的真矢量,也才能求得正确的PPC位置。ARPA中对运用PPC辅助避碰时强调本船保速、目标船保向保速的前提不能被破坏。
ARPA运用PPC概括地描述:适用于开阔水域航行能比较直观快速避让相遇船,不适宜狭水道、进出港等船舶密度大的水域。
3.2PPC应用于AIS所具备的特色船载自动识别系统(AIS)采用自组织时分多址(SOTDMA)接入技术,将船舶的标识信息、位置信息、运动参数和航行状态等与船舶航行安全有关的重要数据,通过VHF87、88频段自动连续地发送给周围船舶,以实现对本海区船舶的识别和监视,同时自动接收周边船舶所发出的AIS系统信息,并与海岸基站进行信息交互。
通过AIS系统可以达到辅助船舶避碰,为船舶交通服务(VTS)提供便利等目的。尽管各目标数据更新周期因船而异,但对于船舶动态数据的更新还是接近实时的,特别是快速船、机动船,因此PPC功能应用于AIS系统中具有如下特色:
(1)AIS直接提供本船及目标船真运动数据,如航行状态、船舶地理位置、航向、航速、转向速率,还有相匹配的静态数据可以获取,以便对目标船进行识别与动态印证。所以,PPC求取过程减少了很多不必要的计算。
(2)AIS提供准实时的本船及目标船真运动数据,因此,PPC计算结果几乎所见即所得,这在船舶机动频繁时,优势显得特别突出。
(3)在AIS中解算PPC,既可以得到航海坐标系中的与本船的相对位置结果,同时也可以得到墨卡托海图中的地理位置结果,更利于地理信息背景下的图形表达。
3.3PPC应用于AIS必须注意的问题
(1)并非所有船舶都安装AIS设备,目前部分特殊船舶及小型船舶尚未安装AIS设备,这些船舶将不能提供AIS信息,相应也不能提供AIS所赋予的辅助避碰功能。
(2)AIS信息的准确度依赖GPS、罗经、计程仪等传感器,任何一种传感器误差都会直接导致AIS的错误显示,如不能正确辨认将会给航海带来风险。
(3)AIS的关键技术是信息技术与通信技术,必然不能绕开计算机技术所共同面临的病毒问题、非法终端的恶意干扰问题、通信网络臃塞问题等;此外还有使用方法不当亦会造成目标识别混淆,或因未按规定开机,造成有船有设备无目标等问题。
综上,虽然AIS及其功能开发能给船舶安全航行带来便利,但仍然存在诸多局限性,使用中应注意与雷达比较对照。
4结语
PPC在AIS系统中的显示,可以使AIS信息表达图形化、可视化,使AIS系统发挥辅助避碰功能更方便、更形象。在此基础上,尚可以方便地知悉本船在当前航速下对目标船的危险航向,从而判断得到安全航向;同时,因为AIS实时性好,甚至可以进一步挖掘系统的试操船功能,即假设本船航速改变时PPC位置会发生何种变化,获得合理的避让方案,从而提升AIS避碰功能,使之在避碰中能与雷达比肩。
