
1引言
雷达用于近岸航行,特别是在雾中、夜间的导航和避碰有着巨大优越性,但单纯的雷达定位使目标测量和海图作业脱节,仅从雷达无法得到直观的舰位。因此,雷达图像与电子海图匹配定位是雷达导航定位发展的必然要求也是电子海图功能拓展的必然趋势。目前国外已有现成产品,如美国的第一代产品——Radarfix,但国内目前还没有雷达图像与电子海图匹配定位的产品。
要解决雷达图像与电子海图匹配的问题,关键是要确定相应的匹配算法。由于实时获取的雷达图像与电子海图是通过不同传感器在不同时间获取的,其图像的灰度值相差很大,因此,必须采用基于特征的匹配算法;同时由于雷达图像存在噪声,致使获取的图像边缘特征存在差异,因此必须采用具有一定容错和抗干扰能力的匹配算法。为此,本文选用Hausdorff距离作为图像匹配时的相似性度量,并给出了快速有效的图像匹配算法,该算法可以保证匹配的鲁棒性和有效性,并能有效克服图像噪声的影响。
Hausdorff距离是定义在图像边缘特征二值图像上的,因此,本文提到的图像均指图像特征提取后的二值化图像。
2Hausdorff距离的定义
以N1×N2维电子海图边缘二值图像N为基准图,以M1×M2维雷达图像边缘二值图像M为实时图,它们是经过边缘提取后生成的二维点集,其中,dF(N,M)和dB(M,N)分别为前向Hausdorff距离和后向Hausdorff距离,其定义分别为:
式中‖·‖为距离范数,本文采用欧式距离。如果定义DU=minm∈M‖U-m‖DU=minn∈N‖U-n‖(U表示空间中的任意点),则Hausdorff距离可定义为:Dhausdorff(N,M)=maxmaxn∈NDn,maxm∈MDm)。本文称DU,DU)分别为点集M和点集N在空间中的变换距离。
由上述定义可知,Hausdorff距离表示了两个点集之间的最不相似程度。
3基于Hausdorff距离的轮廓匹配算法
3.1特征点的提取
特征点是进行图像配准的基础,因此特征点抽取质量的好坏将直接影响到配准的精度和效率。好的特征点应当满足以下条件:
(1)重复度高。抽取出的两幅图内的特征点应具有高度的一致性与稳定性;
(2)包含的信息量大。也就是说被抽取的点很突出,能够有效地反映物体形状的主要结构信息。
为了有效地配准两幅图像,特征点的抽取算法还应该具有旋转、平移不变性,并且当发生小的尺度变化和透视形变时,具备检测出相同位置特征点的能力,然而目前大多数边缘和拐角点提取算法都不满足这一要求。
选用基于Garbor小波分解与尺度交互的特征图像N和图像M的特征点数分别为p和q,则N和M之间的Hausdorff距离Dhausdorff(N,M)可定义为:

点抽取算法,其中小波基函数定义为
角。将[0,c]内的方位角均匀地等分为n个不同方向,θk=Kcn,k=0,1,…,n-1,再将尺度参数T(常定为2或2)抽样成Tj(第j个频段的尺度参数,膨胀系数j∈Z,j=0,-1,-2,…),则相应的小波族为h(Tj(x-x0,y-y0),θk)。将图像I与小波族h卷积即可得到小波转换函数:

图像I在点(x,y)处的能量测度定义为:

式中,Qij(x,y,θk)=g(ki(x,y,θk)-Vkj(x,y,θk)),g表示一种非线性转换函数(如S函数),V=T-2(i-j)为归一化因子,i与j要求满足Ti>Tj。于是特征点(x′,y′)最终作为其邻域Nx′y′内具有最大能量测度的点被抽取出来

3.2特征点曲率的计算
曲率可以唯一地决定二维曲线。对于一般的二次可微参数曲线,曲线上某一点的曲率可以通过该点的一、二阶导数来计算,而离散曲线,则不能这样直接计算提出一种线性插值方法对轮廓进行重采样来计算离散点曲率
首先,通过卷积各离散点去噪,使原始数据能够尽可能减少由于各种原因带来的误差。具体地,设离散轮廓线为r=(x(u),y(u)),其中u为弧长参数,将x(u),y(u)分别和高斯函数G(u,e)作卷积[8]得

为保证每一离散点与其权值都满足一一对应关系,用线性插值的方法对轮廓进行重采样。给定两个点Pi和Pi+1,由下式计算得到插入点Pt的值:
式中,s为当前选定的中心点与插入点之间的距离;j为s的函数;D[i]的值由轮廓上相邻两个离散点之间的距离决定。
去噪后的轮廓线上每一点的曲率为[9]:

根据函数微分的性质有:
当e由小到大取值时,轮廓上保留的细节也相应地逐渐减少。标准差e的最优值,即最佳尺度,应该能够在去除噪声的同时保留轮廓上较小尺寸的细节。
3.3轮廓曲线的匹配
设N1,M1分别是基准图N和实时图M的某一特征段,N1={L1,L2,…,Lk},M1={l1,l2,…,lk},
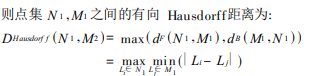
如果DHausdorff(N1,M2)≤X,则说明两个特征段(N1,M2)是匹配的,X为给定的容差。图1是对上述计算过程的进一步阐述。

4匹配实例
为验证本文算法的有效性,进行了实验。匹配算法采用VisualC++6.0编写。
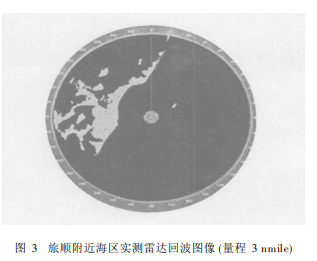
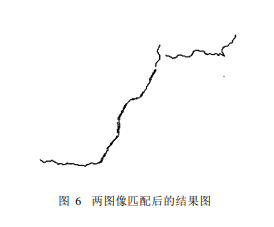
图2和图3分别为旅顺附近海区电子海图及实测雷达回波图像;图4和图5分别为匹配的基准图和实时图(图5已缩放至海图比例);图6为匹配后的结果图,该图是在获得匹配结果的基础上,将实时图的边缘特征叠加在基准图边缘特征上的结果。由于本文重点在于利用边缘特征二值图像进行图像的匹配定位,因而,诸如雷达图像噪声处理、电子海图及雷达图像边缘提取等预处理,没有一一讨论。


5结论
本文将用于图像集合之间相似性度量的Hausdorff距离应用在二维轮廓曲线匹配算法中,通过特征段之间曲率的Hausdorff距离获得匹配的轮廓段。该算法运用卷积积分的方法计算曲线上离散点的曲率,不易受到噪声点的干扰,并且充分利用了轮廓的几何特征信息,大大减少了匹配的时间。
实际仿真结果表明,该图像匹配算法实时性好并具有一定的容错和抗干扰能力,可以保证图像匹配的鲁棒性和有效性。
