
雷达是船舶的重要导航定位设备,特别是在能见度不良的条件下,雷达定位显得尤为重要.目前雷达定位是航海人员先在雷达上测量目标的方位、距离,再到海图上找到相应目标,画出观测船位线得到观测船位.不仅航海人员需要进行测量标绘劳动,还存在测量和标绘等误差影响定位精度,甚至可能出现认错目标,定位错误,危及船舶航行安全的可能性.随着科技的发展,各种新技术应用于航海,特别是电子海图技术、图像采集技术、噪声处理技术等,实现雷达定位自动化,提高定位精度已经成为可能.本文运用匹配理论、电子海图的信息查询和计算机的快速计算功能,研究雷达与电子海图信息匹配定位,实现雷达定位自动化,减轻航海人员的定位劳动,避免定位错误,提高航行的安全性.本文仅就经过去噪处理的雷达采集信息进行研究,有关雷达信息的采集及噪声处理,请看有关参考文献.
1点模式匹配定位原理
二维图像中,特征点用坐标(x,y)表示,匹配特征点集P={p1,p2,…,pm}和Q={q1,q2,…,qn}确定1个配准函数G(tx,ty,s,θ),使得在2个点集中尽可能多的点之间存在稳定的一一对应的关系.G(tx,ty,s,θ)是1个4个参数的仿射变换,其中s是2幅图像的伸缩系数,θ是偏转角度,tx,ty分别是沿X轴,Y轴的位移.如果点集P中有2个点pi、pj和点集Q中的2个点qa、qb存在对应关系,那么可以用配准函数G(0,0,s,θ)表示向量qaqb与pipj之间的对应关系.通过正确的单位选取,s可变为1,所以矢量集之间的配准函数可用G(θ)表示.
对于任意1个点对piqa,若在点集P和Q中存在其他的点对,比如pjqb,使得
 则称点对pjqb是点对piqa的支持点对.1个点对拥有的支持点对数量,称为该点对的支持度.在2个点集中尝试匹配所有可能的点对,找到这些点对中最大的支持数的点对和对应的偏转角度θ,就是配准函数中的θ.
则称点对pjqb是点对piqa的支持点对.1个点对拥有的支持点对数量,称为该点对的支持度.在2个点集中尝试匹配所有可能的点对,找到这些点对中最大的支持数的点对和对应的偏转角度θ,就是配准函数中的θ.
己知1个匹配点对ppairiqqaira和配准函数G(θ),可由以下判据判断点对piqa是否为匹配点对:

所有的匹配点对构成匹配点对集,利用最小二乘法可最终确定出使2个点集匹配的配准函数G(tx,ty,s,θ).
2导航雷达与电子海图信息匹配定位
雷达与电子海图匹配定位可以描述为,对尺寸较小的雷达图像f2,寻找其在较大尺寸的电子海图f1中的位置,利用雷达图像中心点即为舰位和电子海图中点的坐标可转化为已知经纬度的特点,达到定位的目的.这是一种典型的图像配准问题,其核心是找到2幅图像之间的配准函数G(tx,ty,s,θ),求出匹配参数.点模式匹配算法具有一定的鲁棒性,可以克服雷达图像的噪声影响.
特征点必须是能反映图像特征的关键点,数量应适中,兼顾匹配精度和速度.
2.1雷达信息特征点集(Q集)
根据雷达定位测近距离目标边缘的特点,建立雷达回波轮廓特征点集:1)根据采集的回波信号,换算成相对扫描中心的方位F和距离D(均取整,单位:方位为℃,距离为量程/300).2)取每个方向上距离最近的1个回波信号点,组成雷达回波图像特征点集(Q集).
2.2电子海图信息特征点集(P集)
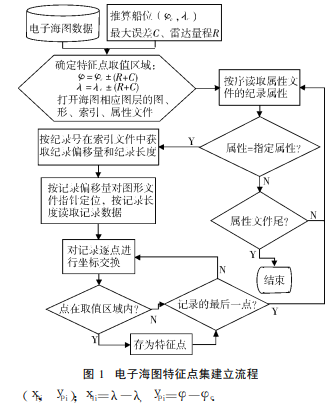
根据雷达定位的原理,电子海图轮廓特征点应是雷达探测范围内,位于水面的目标,如助航标志、岛礁岸线等.建立电子海图轮廓特征点集方法如下:
1)根据推算船位选取相应的海图数据库;分别打开含有水面目标信息的图层文件;
2)根据矢量海图的数据存储格式,读取位置点信息(a,b);
3)将位置信息换算成经纬度坐标:

式中:(a,b)单位为cm;(φz,λz)为海图基准点坐标;c为海图比例尺;
4)计算相对推算船位的方位距离(取与Q集一样的单位并取整),剔除距离大于量程的点;重复2)3)4),直至文件结束;
5)取每个方向上距离最近的点组成海图特征点集(P集).
电子海图特征点集的建立流程如图1.
2.3坐标转换
1)将Q集的点转换为相对雷达扫描中心的坐
2)将P集的点转换为相对推算船位的坐标
2.4匹配定位
2.4.1确定特征点匹配集
确定特征点匹配集就是确定P集和Q集中特征点的对应关系,剔除冗余点.具体步骤[3]:
1)计算同一点集中所有2点(pi,pj)、(qa,qb)之间的距离和方向:
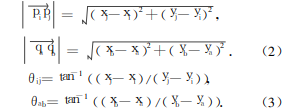
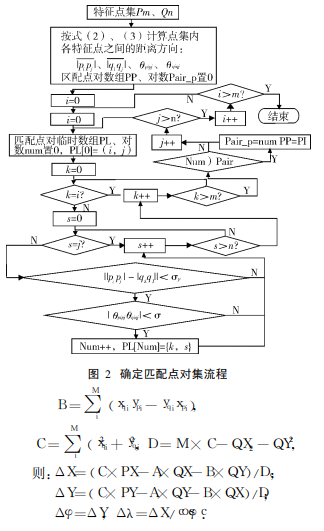
2)寻找支持度最大的点对,获取特征点匹配集.根据雷达回波的特点,支持点对的方向误差域值σθ取1°,距离误差域值σθ取4(单位为1/300量程).确定匹配点对集的流程如图2.
2.4.2平差定位
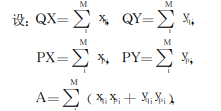
设匹配集由M组点对组成,根据最小二乘法原理,最佳的船位修正量Δλ和Δφ的计算公式为:
3实现与检验
3.1匹配定位流程
1)雷达回波通过采集和滤波处理送到计算机,建立雷达回波近边缘的特征点集(Q);2)根据推算船位(φc、λc),调入对应海区的电子海图信息,建立电子海图特征点集(P);3)调用匹配点对模块,确定匹配点对集;4)调用最小二乘法匹配定位模块,计算舰位修正量(Δφ、Δλ);5)输出船位(φ0、λ0).
3.2匹配定位验证
利用VC++6.0,对上述研究进行了编程实现,并进行实际匹配试验.对船在万山海区航行得到的25幅不同位置雷达回波图像,以当时的GPS位置作为准确船位,与万山海区的C1076电子海图(十万分之一)进行匹配定位,每幅图在一定范围内随机取推算船位10000次,结果定位均方差小于1链,平均用时不到0.5s.
通过试验,可以看出,利用雷达和电子海图信息进行匹配定是可行的,具有较高的定位精度和较好的实时性.
