
1.基于ECDIS的自动避碰专家系统的探讨
专家系统(Expert System)是一种在特定领域内具有专家水平解决问题能力的程序系统。 它能够有效地运用专家多年积累的有效经验和专门知识,通过模拟专家的思维过程,解决需 要专家才能解决的问题。 专家系统属于人工智能的一个发展分支,自1968年费根鲍姆等人研制成功第一个专家系 统DENDEL以来,专家系统获得了飞速的发展,并且运用于医疗、军事、地质勘探、教学、 化工等领域,产生了巨大的经济效益和社会效益。现在,专家系统已成为人工智能领域中最 活跃、最受重视的领域。
避碰专家系统是应用于船舶避碰操纵中的一种决策性专家系统,本系统通过对外部数据 的收集,然后通过航海专家知识库进行分析由推理机给出避碰建议。以前的避碰专家系统中 外部信息的收集往往是基于AIS来收集避碰危险物标信息,但是AIS的避碰信息明显是不充分 的,比如水下危险物(暗礁、适淹礁等)、固定危险物标、助航标志等静态物标避险信息在 AIS中是无法显示的,而电子海图信息显示系统恰恰弥补了这些空白。作者认为基于ECDIS 的避碰专家系统做出的避碰决策会更加准确、实用。
2. 基于ECDIS的自动避碰专家系统结构
基于ECDIS的自动避碰专家系统结构如图1所示
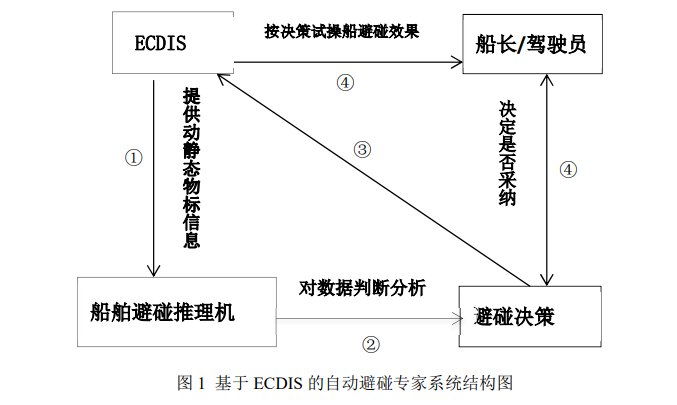
工作过程以ECDIS数据为基础,收集船舶动态及静态物标信息,通过步骤①传给专家系 统推理机,经过步骤②推理机给出避碰决策,避碰决策通过步骤③在ECDIS上显示试操船效 果,通过步骤④提供给船长或值班驾驶员,由船长和驾驶员决定是否采纳避碰专家系统提供 的避碰决策,如果同意则按照避碰决策执行避碰,完成一个避碰过程,如不同意则反馈给专 家系统,采取其他的避碰决策,直到满意为止。船长或值班驾驶员也可以直接越过避碰专家 系统,人为采取避碰行动。
3. ECDIS的组成与功能
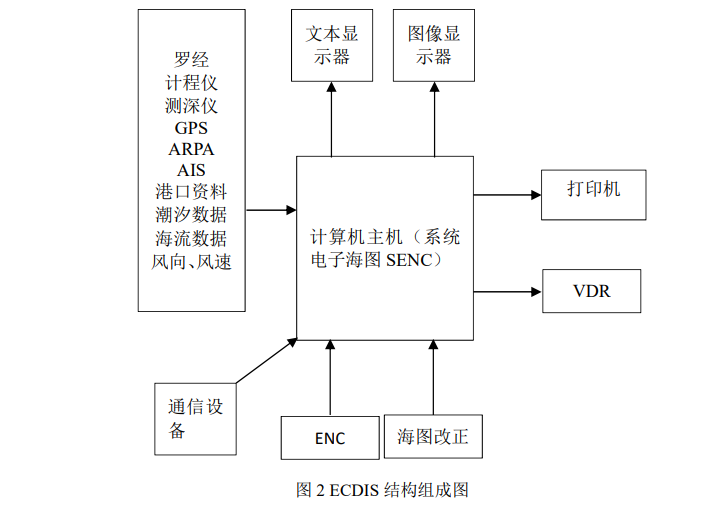
3.1 ECDIS的组成 ECDIS实质上是一个具有高性能的内、外部接口符合S52标准要求的船用计算机系统。系统的中心是高速中央处理器和大容量的内部和外部存储器。外部存储器存的容量应保证能够 容纳整个ENC、ENC改正数据和SENC。中央处理器、内存和显存容量应保证显示一幅电子海 图所需时间不超过5秒。如图2所示。
3.2 ECDIS的功能 按照国际标准电子海图显示与性能的要求,ECDIS应该具有一些以下功能: (1) 海图显示与控制:允许人工手动打开海图,完成多幅海图的快速无缝拼接,能够实 现海图缩放、漫游、进行画面回退、跳转、以及特定区域显示,实时显示本船的船位等信息, 能够以完全、标准、基础中任意的显示方式进行显示并可以实现三种方式间的相互切换,能够完成黑夜、黄昏、晴朗白昼等背景下的显示;
(2) 海图汇算:能够计算海图上两点之间的相对方位和距离,并且可以计算多点之间的 总距离;
(3) 海图信息查询:允许查询海流、水深、航道、航标,能够给出任一航线的航行条件、 任一物标的具体信息;
(4) 海图临时标绘:允许在海图上进行任意图形和文字标注;
(5) 海图改正:能够接受来自各方的海图改正数据,并能够完成ENC的手工改正,半自 动改正和自动改正;
(6) 导航及定位:能够接收、处理来自 GPS、测深仪、计程仪、电罗经等传感器的信息, 从而获得本船的信息;
(7) 标准海图数据导入:能够随时导入标准的海图数据;
(8) 雷达及ARPA信息处理:能够实时显示接收到的 ARPA目标数据和雷达图像,可以跟 踪目标并进行相应的计算,以供航海人员使用;
(9) 航行管理:能够设计船舶预定的航线,并完成预定航线的选择、删除、显示、修改 等等;
(10) 航路监视:ECDIS 要能够对偏离了原先设定航线的航行船舶进行报警, 它还应能 显示出本船航路上前方的暗礁和浅滩等以达到避礁和防浅的目的;
(11) 航行记载:ECDIS 能够自动地记忆前面 12 小时内的一切航行信息,以供相关人员 的查看和分析;
(12) 报警:当有危险发生或者危险可能发生时,ECDIS能以一定的形式发出警告,如声 音、图像等。
综上所述,电子海图显示与信息系统能够提供船舶航行所需的航行信息。物标动态信息 由AIS、ARPA雷达、GPS定位系统、罗经等传感器提供,包括物标的航向、航速、CPA、TCPA 等;静态信息主要由SENC 海图信息提供,包括航道宽度、水深、碍航物、航标等外部环境 因素。这些信息能够满足船舶避碰的需求,因此ECDIS作为避碰专家系统的数据提供者是完 全可行的。 计算机主机(系统 电子海图 SENC) 打印机 VDR ENC 海图改正 文本显 示器 图像显 罗经 示器 计程仪 测深仪 GPS ARPA AIS 港口资料 潮汐数据 海流数据 风向、风速通信设备
4. 船舶避碰推理机
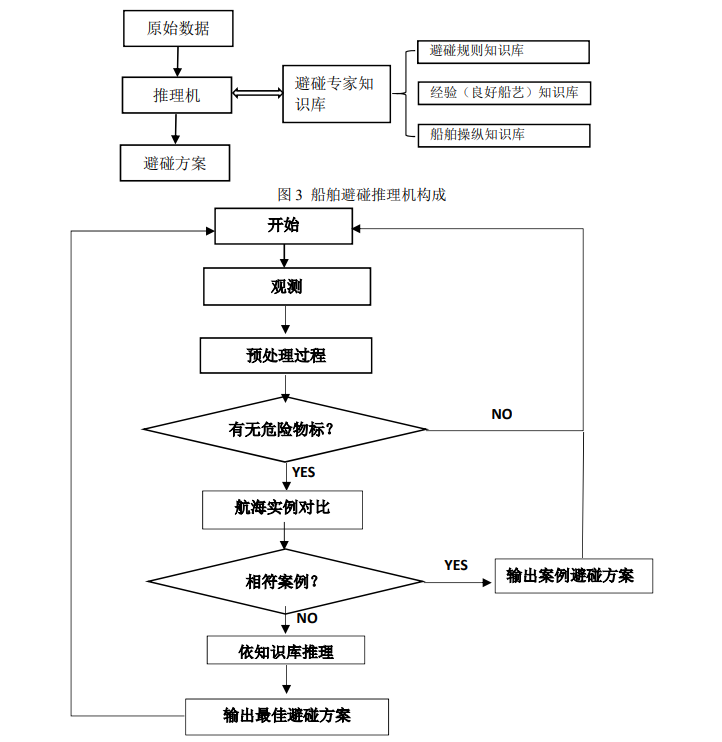
4.1 船舶避碰推理机的构成 船舶自动避碰专家系统的核心部分是避碰推理机,避碰推理机获取原始数据后根据避碰 专家知识库进行推理判断,如果两船存在碰撞危险,则根据两船会遇几何关系式

(根据牛顿迭代法求解转向角。 船舶避碰推理机主要依据避碰专家知识库对船舶是否存在碰撞危险进行判断,因此科学、 完善的避碰专家知识库的建立尤为重要。如图3所示,避碰专家知识库主要由三个子知识库组 成,分别是避碰规则知识库、经验(良好船艺)知识库、船舶操纵知识库。避碰规则知识库 主要来源于《1972年国际海上避碰规则》中船舶互见条款和责任条款;经验(良好船艺)知 识库主要来源于各院校和企业专家的意见和经验总结;船舶操纵知识库主要来源于船舶操纵 特性,包括船舶在各种载重状态下的旋回性能、螺旋桨效应、冲程、下沉量、应舵时间等。
4.2 船舶避碰推理机的工作流程 依据船舶避碰的实际过程和船舶避碰专家系统的功能要求,设计船舶避碰推理机的工作 流程,工作流程如图4所示。
5. 结束语
由于人为因素引起的海上船舶碰撞事故的比例始终居高不下,加之现代高新科技,尤其 是计算机技术、模糊数学理论、神经网络技术以及人工智能技术的飞速发展,船舶避碰系统 的研究必将向着自动化、智能化的方向进行。 航海自动避碰辅助系统的开发,不仅能够有效地解决航海领域内当前所面临的问题,保 证航行的安全,带来显著的经济效益,而且对今后船舶自动航行系统、智能驾驶台系统提供 了良好的物质基础与技术支持。同时对提高我国船舶现代化、自动化水平,有着十分重要的 意义。
