引言
电子海图是海上活动的基础,自动化的航线设计是电子海图应用的重要内容.民用船只的航线通常较为固定,但选择较为经济的航线仍是船舶运营公司提高竞争力的重要因素,尤其在海上避难、搜救等应急行动中,更需要灵活多变地选择航线.而军事航海是一种更具特殊性的航海活动,海军舰船由于航渡任务多种多样,航行海区复杂多变,航线设计具有更大的复杂性、特殊性.因此,快速、可靠、优化的计划航线设计已成为现代特种航海中至关重要的环节.对于民用航线的可行性分析及多条航线的优化选取,已有相关的研究.对于军事计划航线,也有学者基于矢量电子海图平台,对已经选定的航线做过安全性评估.但目前航线设计的模式基本上还是根据个人经验,用手工方式,在执行任务前事先完成.在航线设计时,主要依靠人工分析海图上的水深注记、等深线、障碍(碍航)物等信息,拟定航行的计划路线,在航线选定后,通过计算机辅助分析航线的可行性.在未来的海上活动中,可能要求根据航行安全区域的情况,快速设计出海图上的最短航线.在海底地形较复杂的海域,传统的航线设计方法已难以适应现代特种航海行动的需求.因此,研究电子海图平台下的计算机自动设计航线方法,在海图上任意两点之间自动地找出一条最短的可行性航线,具有理论和现实意义.
本文将通过追踪安全等深线,处理障碍区,得到可航渡区域.在可航渡区域内,进行航路的可航渡性测试,自动地生成最短计划航线.
1可航渡区域的确定
1.1安全等深线的追踪自动化航线设计,首先应求出可以安全航行的水域.在矢量电子海图平台下,根据数字水深模型,由计算机自动追踪出安全等深线.同时考虑航行障碍物的影响,确定障碍区的范围.当前用于舰船导航的海图水深为不规则的离散点数据,本文采用三角网法追踪等深线.图1是利用某海区的水深数据构建的三角网和绘制10m安全等深线后,从原图中截取的一部分.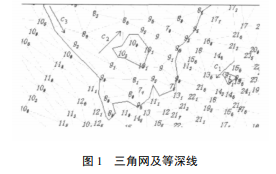
在图1中,左侧为浅水区,右侧为深水区.箭头方向为等深线的正向;反之,浅水区在右、深水区在左的方向为等深线的负向.内部为浅水区的闭合等深线(图1中的c1)为第Ⅰ类等深线;内部为深水区的闭合等深线(图1中的c2)为第II类等深线;非闭合等深线(图①中的c3)为第Ⅲ类等深线.
对于闭合等深线与非闭合等深线,在追踪时可根据起点是否与终点重合来区分.第Ⅰ类和第Ⅱ类等深线都是闭合的多边形,区分这两种等深线还需进一步判断等深线的节点是顺时针还是逆时针排列.
1.2安全水域的提取
安全等深线是舰船航行的安全区域与危险区域的分界线.第I类安全等深线的内部区域,通常是岛礁、浅地等地理要素(称为自然障碍区).第Ⅲ类不封闭安全等深线,为安全水深区与危险水深区的边界线.沿这类等深线的正向,将其与研究区域外边界形成一封闭区域,其内部为浅水区域,也是自然障碍区.第Ⅱ类等深线,尽管内域深于安全水深,但其位于更大障碍区的内部,航线分析时只需考虑外围障碍区.除从安全等深线提取的自然障碍区外,还有沉船、养殖区等点、线、面障碍物(称为人工障碍物).考虑这些障碍物影响域,即为点、线、面目标的缓冲区域,是一种人工障碍区,如图2中的方框内区域A1.所有这些不可航渡的区域统称为障碍区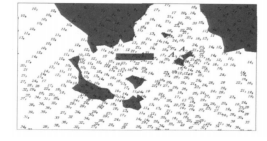
1.3障碍区的扩充
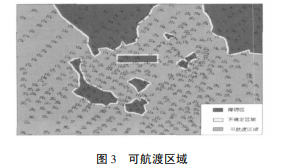
障碍物位置的不确定性、风(流、浪)对安全性的影响、舰船的回旋半径、导航定位系统精度等因素,都会对可行性航线设计存在一定的影响.考虑这些不确定性因素的影响,出于对安全可靠性的考虑,将原有障碍区的范围进行一定的扩充,以便留有余地.此过程类同目标的缓冲区求取,本文中采用角平分线的方法求扩充影响区,被扩充的不确定性区域如图 3 所示
1.4障碍区的处理
某些障碍物进行扩充后,两个障碍物之间可能相互相交,如图2中的障碍区A2、A3.对于相交的障碍物多边形,应进一步进行多边形求并的操作.经过合并处理后,形成如图3所示的障碍区A4.某些障碍区进行扩充,多边形的边还可能自相交,都需要进行相应的处理.经过一系列相应的处理后,障碍区、航行安全性不确定区域和可航渡区域如图3所示.
2最短航线的自动构建
2.1可航渡路线的测试
求得安全的可航渡区域后,就要建立一条最短的安全航线.
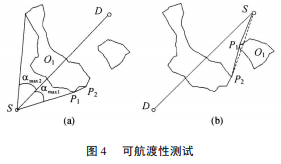
如图4所示,当舰船需要从出发点S航行到目的点D,其可行性航线建立步骤如下:(1)先建立一条从S到D的可航渡性测试线[图4(a)].如果测试线不经过障碍区,则两点之间可以直线航行.如果仅从航海要求考虑,则从S到D的直线段就为海图上的最短设计航线.(2)如果经过障碍区,则求出测试线穿越且离S最近的障碍区O1,O1的顶点必定分布于测试线的左右两侧.(3)计算S到O1各个顶点的方位,然后在测试线两侧,分别求出与测试线SD方位之差的最大值αmax1、αmax2.对应的两个顶点分别是两侧能绕过障碍区的两个航路点.比较的大小,取其中较小的一个夹角相对应的顶点为航线的下一个航路点[如图P1到P1的方位计算),取夹角较小者所对应的顶点P2为下一个航路点.不断进行可航渡性测试,直到航路点与终点可直线航行,则此条可航性航线建立完成.
在建立航路点到极值方位差所对顶点的航段中,中间可能碰到障碍物,所以应对建立的每一航段都进行可航渡性测试.如图4(b)所示,建立测试线SD,求出测试线穿越且离S最近的障碍区O1,根据可航渡路线中方位相差最小原则,下一个航路点应为P2.在建立S到P2的航段中,发现SP2经过障碍区.所以要对建立的航段SP2同样进行可航渡性测试,最后形成的结果应先增加航路点P1,形成SP1、P1P2两个航段
2.2可航渡路线的优化
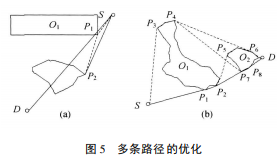
如图5(a)所示,建立测试线SD,由于SD经过最近的障碍物O1,根据方位相差最小原则,建立下一个航路点P1,依次得到下一个航路点P2.可是在图5(a)中发现,从S可直航到P2,P1成为了一个冗余的航路点.所以需要对建立的可航渡段进行优化,删除冗余的航路点,保证最大的直线航段.
在航线生成过程中,当遇到新障碍物时,不进行方位差比较,分别记录两侧的两条可能性路径.如图5(b)所示,在点S遇到新障碍物O1,需要同时建立两条路径SP1和SP3,沿障碍物O1绕行时,从P1或P3分别测试路径时,可采用方位相差最小原则使接下来的各自测试路径唯一.但遇到新障碍物O2,又需重新从测试点再次建立两条路径,从P2分别到P5和P7(在P2到P5的可航渡性测试中,用前面方法自动增加必要的航路点),从P4分别到P6和P7,形成4条路径.不断循环,直到测试点与D可视,当有n个航行障碍物时,需要建立2n条路径,最后从中选取最短者为最后结果.
失事平台的残骸、不断人为设置的航行障碍等,都可能对可航渡的区域和最优航线构成一种动态的影响.因此,在航线自动设计方法中,还应考虑这种障碍区的动态检测及实时更新,当障碍区发生变化后,采用前面所述的方法,重新自动搜索最短航线.
3实验与分析
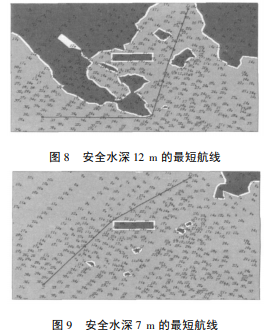
为了验证算法的有效性,本文进行了相关实验.图6中的折线是为安全水深10m的舰船所设计的航线,是在可航渡区域提取的基础上,自动生成的一条最短计划航线.图7是舰船从起点航行到点P后,人工障碍区发生变化,自动地进行最短航线调整.图8是为安全水深12m的舰船自动生成的最短航线,图9是为安全水深要求7m的舰船所生成的最短航线.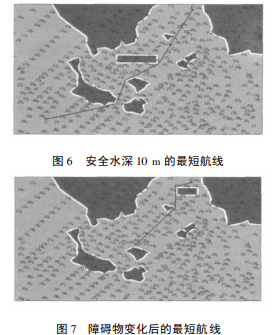
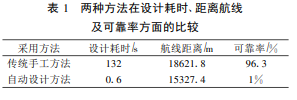
采用本文的航线自动设计方法,可以方便地根据不同舰船的吃水要求,随意地选定安全水深。只要输入起点和终点的位置,即能显示最短计划航线.表1是在某航线的设计中,计算机自动设计与使用手工作业方法在设计耗时、航线距离及可靠率(不穿越扩充后障碍区的设计航线占所有设计航线的比率)方面的比较.