
0引言
电子海图和船用雷达是船舶综合导航系统的重要组成部分,对船舶避碰、防止船舶搁浅起着至关重要的作用.两者单独使用会出现一定的局限性,因此,电子海图与雷达图像叠加是必要的,这种叠加弥补了雷达或电子海图系统单独使用的缺陷,提高了船舶航行的安全性.
雷达回波信号采用极坐标方式表示,计算机显示采用直角坐标方式,因此要实现雷达图像与电子海图的叠加,必须将雷达回波信号的极坐标转化为直角坐标.雷达无线电波是沿地表最短距离(大地线)传播,而不是沿恒向线方向传播,因此坐标变换时,若简单地以平面直角坐标系变换方式,则会产生一定误差.坐标变换的过程其实就是已知起点、初始方向及距离,求终点地理坐标的过程,即大地问题正解的过程.以椭球面为基础的大地线正解问题计算精度高,但计算繁琐,不利于实时数据处理.雷达回波信息量大,同时雷达信号处理任务又极为繁重,在纬度低的海域,可用平面模型代替椭球面模型,平面模型数据计算简单,同时在精度一定条件下也可满足要求.
1坐标变换方法
1.1椭球面模型坐标变换方法
大地线正解问题的计算方法很多,其中vincenty公式精度高、适用广,适合在计算机系统运行.计算步骤如下:
tanσ1=tanU1/cosα1(1)
sinα=cosU1sinα1(2)
A=1+u216384{4096+u2[-768+u2(320-175u2)]}(3)
B=u21024{256+u2[-128+u2(74-47u2)]}(4)
2σm=2σ1+σ(5)
Δσ=Bsinσ{cos2σm+14B[cosσ(-1+2cos22σm-16Bcos2σm(-3+4sin2σ)·(-3+4cos22σm)]}(6)
σ=sbA+Δσ(7)
式(5)—(7)迭代计算,直至变化微小,第一次计算σm时的σ用式(7)计算.
C=f16cos2[4+f(4-3cos2α)](10)
L=λ-(1-C)fsinα[σ+Csinσ[cos2σm+Ccosσ(-1+2cos22σm)]}(11
1.2平面模型坐标变换方法
表格1为量程分别为0.75、1.5、3、6、12nmile时,在不同纬度的椭球模型与平面模型计算的最大误差值.
电脑屏幕每像素长度为0.0003m,若椭球模型与平面模型的计算误差换算到屏幕长度后小于一个像素的长度,则该误差可以忽略不计.例如,恒向线解决已知起始点坐标及距离方位,计算终点坐标.墨卡托解算步骤如下:
Δ=ScosC(12)Δλ=DMP×tanC(13)
DMP=MPφ2-MPφ1(14)

2椭球模型与平面模型计算误差
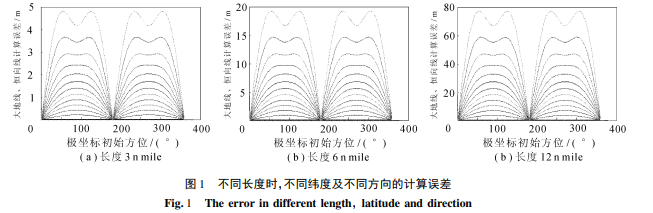
雷达图像叠加电子海图可用于避碰,判断船位是否准确,远距离的叠加没有意义,因此对航用雷达的典型量程0.75、1.5、3、6、12nmile在不同纬度的0°—360°方向计算椭球模型与平面模型的计算误差.图1为长度分别为3、6、12nmile时,椭球模型与平面模型的计算误差.由图1可知,椭球模型与平面模型的计算误差随极坐标长度的增加而增大,随所在纬度的增加而增大,随极坐标方向的变化呈周期性变化.
极坐标长度为6nmile时,在纬度50°处的最大误差为11.671206,因此当电子海图比例尺小于1∶38904.02时,椭球模型与恒向线模型计算误差换算到屏幕上时小于一个像素,可忽略不计.
表格2为不同纬度处对应长度的极限比例尺.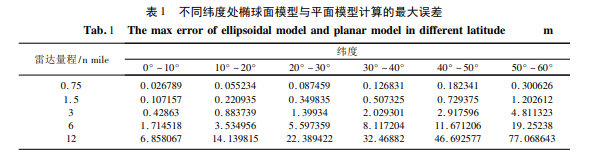
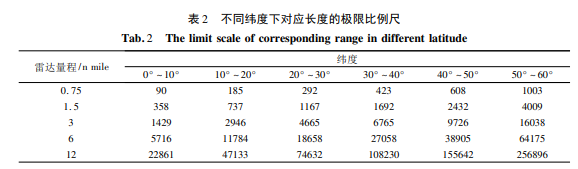
中国人民解放军海军司令航海保证部的官方电子海图列表中,单幅海图的最大比例尺为1∶5000,因此极坐标长度小于1.5nmile时可直接用平面模型代替椭球模型.在编程实践中,将极限比例尺事先定义为二维数组,在坐标变换过程中,根据所在纬度、坐标长度查找极限比例尺.若当前显示比例尺小于极限比例尺则可用平面模型代替椭球模型.
3结语
本文对比了雷达典型量程在不同纬度、不同方向上椭球模型与平面模型坐标变换误差,给出了适用平面模型代替椭球模型的极限比例尺.该方法可行,可为雷达与电子海图叠加显示提供依据
