
引言
船舶电子海图系统中包含了导航、通信、控制管理等重要信息,在航运管理和港口控制领域,电子海图的重要性更加突出。因此,在设计电子海图时,需要重点解决一些自动化技术,使该系统能够自动监控船只的运行状态,极大降低了船员和航运管理人员的劳动强度。
1船舶电子海图信息系统
电子海图 AIS 系统的原理如图 1所示。其中在数据链路中,功能模块划分为:从网络监听由串口服务器发送来的 AIS 情报数据。采用 TCP/IP 协议长连接数据监听。串口服务器为服务器,接收模块为客户端。报文解析功能模块:将 AIS 报文数据依据国际标准协议规定的格式,数据分类功能模块:将原始数据进行分类,形成所需要查询航迹信息数据,去除冗余的数据,放入待写入队列。
因此,在该系统中主要完成对 AIS 情报数据接收与分类写入功能,其对数据主要处理为形成单批查询数据以及单时查询数据。为查询提供优化后的数据,简化前台。
2电子海图 AIS 系统中的自动化实现架构分析
2.1主要结构
在现代航海业中,船舶的导航和通信都非常依赖于各种先进的电子设备,而电子海图作为一种刚出现的导航设备,能够结合雷达信息、GPS、天气气象、船舶管理等多种功能。主体结构如图 2所示,以电子海图为中心,配合数据库、自动导航系统和显示输出模块,从而能够对船舶进行全面的控制。
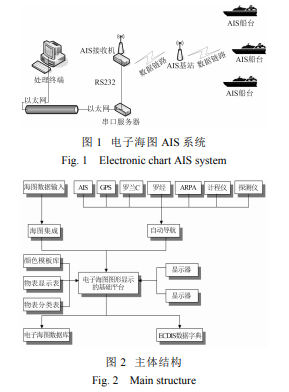
在如图 2所示的电子海图主体结构中,各种控制设备之间需要借助统一的通信协议进行数据传输,一般为了增强抵抗外界干扰的能力,采用如下 3 种通信协议:
1)SOTDMA 协议。即所谓的自组织时分多址通信技术,该通信网络能够实时对周围的船舶和主控制台播报自己的位置信息和航行信息。尤其适用于正常航行状态,能够显著降低组网成本。
2)IDMA 协议。即所谓的增量式时分多址通信技术,在通信过程中,主要依靠特定的协议,进行间歇性通信,需要在所有用户之间协调好彼此的数据传输策略。
3)RATDMA 协议。该通信协议中文名为随机式时分多址,在数据通信时,采用随机验证码进行用户身份的识别,在通信接口识别和密钥传输中,都是由统一的随机发生器进行加密的。
2.2海图传感数据的处理
海图的传感数据组成是非常复杂的,每种类型的数据在采集时可能会存在较大的干扰,只有经过适当的滤波后,才能被输入到电子海图系统中进行集中处理[3–4]。因此,本文采用最小均方误差准则,消除所采集数据中的干扰分量。所采用的自适应滤波器为横向结构。设系统中的数字滤波输出信号为y(n),且满足

式中:WT为转置矩阵;N为滤波器采样的次数;n为时间变量。在滤波器的输出形式中,可以通过函数x(n)和w(n)卷积得到。
假设系统输入的误差信号为:
e(n)=d(n)−y(n),(2)
进行变换得到:
y(n)=wT(n)∗x(n),(3)
即e(n)=d(n)−y(n)=d(n)−wT(n)∗x(n)。(4)
式中:d(n)为期望信号;y(n)为海图输出数据。对变换得到的两个向量x(n)和e(n)分别进行最小化计算,从而可以得到有效的误差系数。
在对传感器数据进行滤波处理时,由于误差序列e(n)并不是随机的,因此为了达到最佳的滤波效果,需要使误差信号尽可能与实际的信号相同。
令最小均方误差表示为:
e=E[e2(n)],(5)
式中E[]为算子的期望值。与y(n)统一化计算后,得到的误差量为:
e=E[e2(n)]+wT(n)∗R∗w(n)−2wT(n)∗P。(6)
R=E[x(n)∗xT(n)]N×NP=E[d(n)∗x(n)]N∗1x(n)d(n)其中:为自相关矩阵;为互相关向量。需要注意的是,输入信号与期望信号之间为相互关联的关系。
在采用自适应滤波器对包含误差信号的输入量分析时,一般通过设置误差矩阵R和矢量P,然后调整权系数矢量w,以得到实际的输出值。
下面对w求偏导,并满足

可得到最优的解为:

由于矩阵R为非奇异性质的,因此可以得到误差最小的滤波系数为:

此解即为最佳滤波值。
2.3海图故障的诊断
采用非线性的传递函数f(·)表示海图的故障函数。本文采用如下 2 种传递函数:
1)数字形式

2)模拟形式

上述的数字形式故障主要表示在计算机处理时所产生的随机干扰,而模拟形式的故障则描述了传感器数据采集时外界的高频干扰[5–6]。针对上述的故障,本文结合 BP 神经网络,设计了如图 3所示的诊断流程,并给出了自适应滤波算法,以实现高保真信号的输出。
输入信号为:
x(k)=A0cos(w0t+ϕ0)+b(k),(12)
其中b(k)为附加的白噪声。
xr(k)=A0cos(w0t+ϕ0),(13)
修正后的自适应滤波器的算法为:

自适应增益行向量

设定系统的误差为h(k)=h(k−1)+g(k)e(k),若自适应函数输入为(1,n)。

当输入信号为x(k)时,则故障诊断系统的自适应滤波输出为:
y(k)=hT(k)x(k)。(17)
3结 语
随着计算机计算和网络技术的发展,电子海图的功能也变得更加多样化,而数据收集和数据处理已经变得更加重要。在不久的将来,电子海图将发挥更大的作用。
